Dalam era teknologi modern, pengembangan sistem otomatis menjadi semakin penting untuk meningkatkan efisiensi dan kenyamanan dalam sektor peternakan. Tugas besar ini bertujuan untuk merancang dan mensimulasikan sistem pakan ternak otomatis dengan menggunakan berbagai jenis sensor melalui simulasi di Proteus. Sensor-sensor yang digunakan mencakup sensor PIR untuk mendeteksi keberadaan hewan ternak, sensor ultrasonik untuk mengukur jarak atau jumlah pakan, sensor suhu untuk memantau kondisi lingkungan, sensor gas untuk mendeteksi kualitas udara, sound sensor untuk merespons suara hewan, serta touch sensor untuk interaksi atau aktivasi manual.
Integrasi dari berbagai sensor ini memungkinkan sistem pakan bekerja secara otomatis, mulai dari pengaktifan konveyor pakan, pengendalian jumlah pakan yang keluar, hingga pemantauan kondisi kandang demi menjaga kesehatan dan kenyamanan hewan. Simulasi ini tidak hanya mengeksplorasi kemungkinan teknis dalam integrasi sensor-sensor tersebut, tetapi juga menawarkan pendekatan inovatif untuk meningkatkan efisiensi pengelolaan peternakan. Dengan sistem pakan otomatis ini, diharapkan dapat tercipta solusi yang mendukung produktivitas, efisiensi tenaga kerja, serta standar kebersihan dan kesehatan yang lebih baik dalam industri peternakan.
Dapat mensimulasikan rangkaian bebrapa macam sensor
3. Alat dan bahan
A. Alat
Instrumen
1. DC Voltmeter
DC Voltmeter merupakan alat yang digunakan untuk mengukur besar tengangan pada suatu komponen. Cara pemakaiannya adalah dengan memparalelkan kaki2 Voltmeter dengan komponen yang akan diuji tegangannya.
Berikut adalah Spesifikasi dan keterangan Probe DC Volemeter
Generator
1. Power
Berfungsi untuk memberikan tegangan sumber pada rangkaian
Input voltage: 5V-12V
Output voltage: 5V
Output Current: MAX 3A
Output power:15W
conversion efficiency: 96%
2. Baterai
Spesifikasi
Input voltage: ac 100~240v / dc 10~30v
Output voltage: dc 1~35v
Max. Input current: dc 14a
Charging current: 0.1~10a
Discharging current: 0.1~1.0a
Balance current: 1.5a/cell max
Max. Discharging power: 15w
Max. Charging power: ac 100w / dc 250w
Jenis batre yg didukung: life, lilon, lipo 1~6s, lihv 1-6s, pb 1-12s, nimh, cd 1-16s
Ukuran: 126x115x49mm
Berat: 460gr
B. Bahan
Resistor
Resistor merupakan komponen elektronika yang berguna untuk menghambat aliran arus listrik sehingga tidak terjadi short circuit. mempunyai resistansi yang berbeda beda sesuai kebutuhan.
Resistor
Spesifikasi :
Dioda
Diode (diode) adalah komponen elektronika aktif yang terbuat dari bahan semikonduktor dan mempunyai fungsi untuk menghantarkan arus listrik ke satu arah tetapi menghambat arus listrik dari arah sebaliknya.
Spesifikasi:
Transistor NPN
Sederhananya, transistor NPN merupakan komponen elektronika yang terdiri dari dua semikonduktor tipe-n yang mengapit semikonduktor. Ketika sinyal kecil diberikan pada lapisan basis transistor, maka transistor NPN akan mengalirkan arus listrik dari lapisan kolektor ke lapisan emitor. Arus listrik yang mengalir melalui transistor dapat dikendalikan oleh sinyal kecil yang diberikan pada lapisan basis.
Konfigurasi Pin:
Spesifikasi :
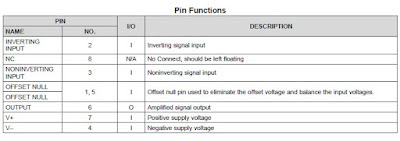
Operational amplifer
Operational Amplifier atau yang lebih sering disebut op amp merupakan suatu komponen elektronika analog yang berfungsi sebagai penguat atau amplifier multiguna yang diwujudkan dalam sebuah IC op-amp.
Karakteristik IC OpAmp
• Penguatan Tegangan Open-loop atau Av = ∞ (tak terhingga)
• Lebar Pita (Bandwidth) atau BW = ∞ (tak terhingga)
• Karakteristik tidak berubah dengan suhu
Konfigurasi Pin:
Spesifikasi :
. Potensiometer
Potensiometer adalah sebuah alat elektronik yang digunakan untuk mengukur dan mengontrol tegangan listrik dalam suatu rangkaian. Potensiometer sering digunakan sebagai pengatur volume pada perangkat audio, pengatur kecerahan lampu, dan dalam berbagai aplikasi lain yang memerlukan kontrol variabel terhadap tegangan atau arus listrik.
Spesifikasi :
Komponen Input
1) Sensor PIR
Sensor PIR (Passive Infra Red) adalah sensor yang digunakan untuk mendeteksi adanya pancaran sinar infra merah. Sensor PIR bersifat pasif, artinya sensor ini tidak memancarkan sinar infra merah tetapi hanya menerima radiasi sinar infra merah dari luar.
Konfigurasi Pin:
Spesifikasi:
Grafik respon sensor PIR:
2. Touch Sensor
Touchpad bekerja dengan cara mendeteksi sentuhan jari-jari manusia melalui sensor capacitance yang terletak pada permukaan dan memanjang membentuk sumbu vertikal dan horizontal. Touchpad tidak dapat mendeteksi sentuhan benda lainnya selain jari manusia karena posisi sentuhan ditentukan melalui kombinasi cara kerja antara sensor capacitance sumbu vertikal dan horizontal.
Konfigurasi pin :
Spesifikasi
Grafik Respon Sensor Touch
Dapat dilihat bahwa pada grafik di atas saat sentuhan terdeteksi maka signal touch akan muncul.
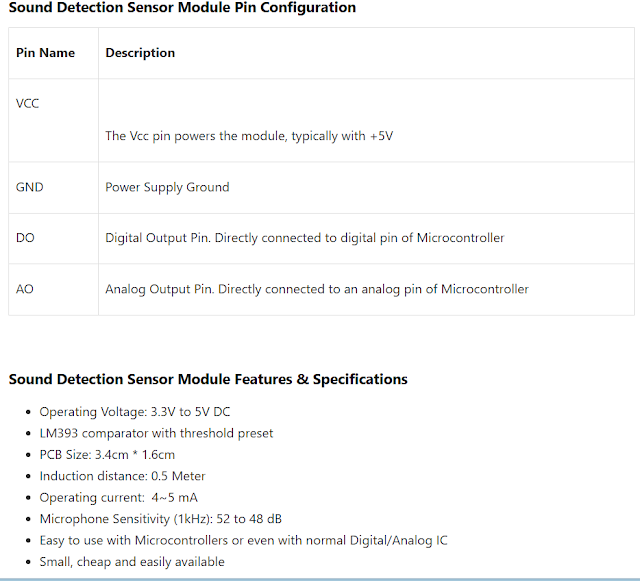
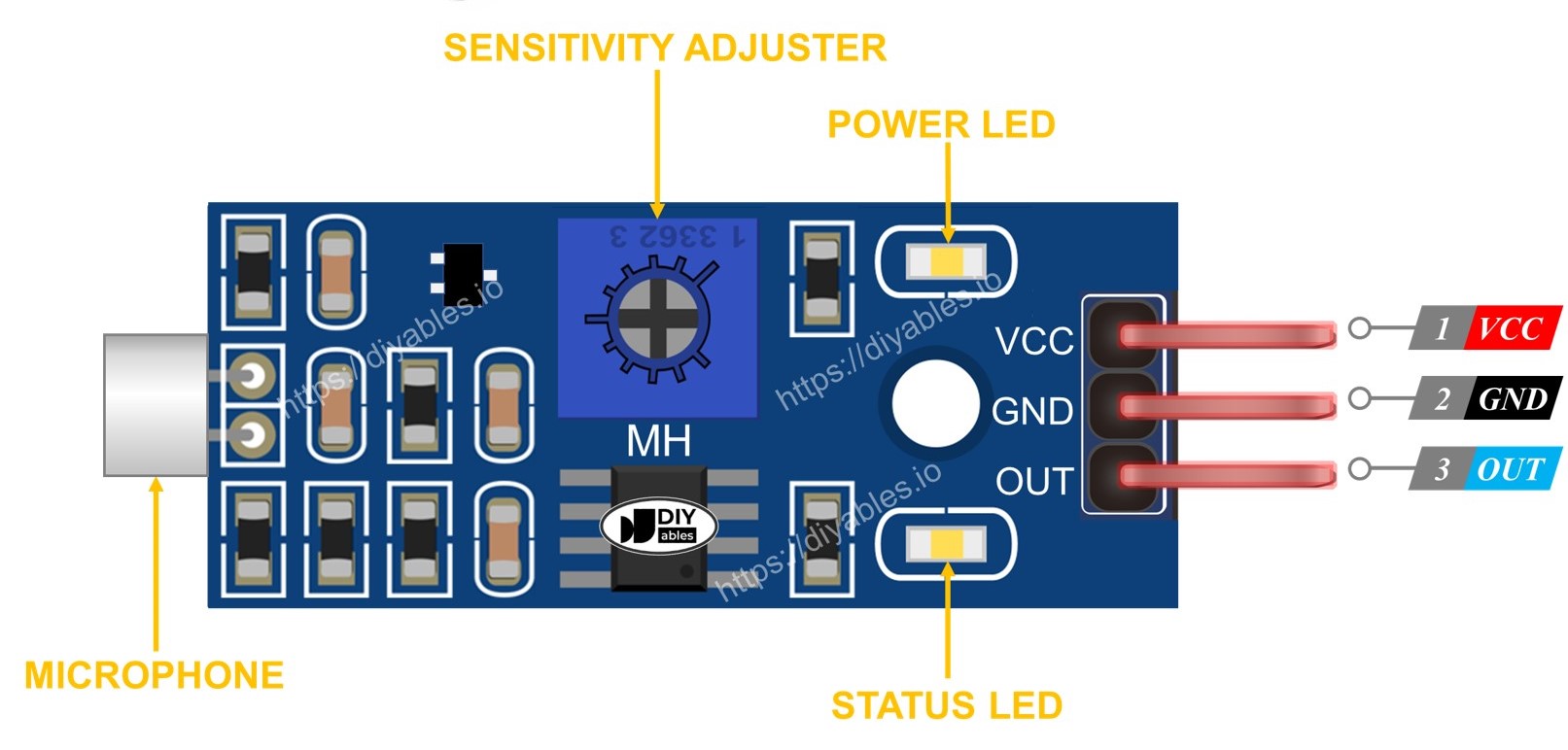
3. Sensor Suara
Sensor suara adalah sebuah alat yang mampu mengubah gelombang Sinusioda suara menjadi gelombang sinus energi listrik (Alternating Sinusioda Electric Current). Sensor suara bekerja berdasarkan besar kecilnya kekuatan gelombang suara yang mengenai membran sensor yang menyebabkan bergeraknya membran sensor yang juga terdapat sebuah kumparan kecil di balik membran tersebut naik dan turun. Kecepatan gerak kumparan tersebut menentukan kuat lemahnya gelombang listrik yang dihasilkannya.
Grafik respon sound detector
Jejak hijau tua adalah output audio dari detektor suara. Tegangan audio langsung dari mikrofon ditemukan pada output ini.
Jejak hijau muda adalah keluaran amplop. Tegangan analog ini melacak amplitudo suara. Yang menarik, perhatikan bahwa denyut nadi ketiga terasa lebih keras saat berjalan.
Akhirnya, garis merah adalah output gerbang. Output ini rendah ketika kondisi tenang dan menjadi tinggi ketika suara terdeteksi.
4. Sensor Suhu LM35
Sensor LM35 bekerja dengan mengubah besaran suhu menjadi besaran tegangan. Tegangan ideal yang keluar dari LM35 mempunyai perbandingan 100°C setara dengan 1 volt.
Konfigurasi Pin:
Spesifikasi :
Berikut hubungan resistansi dengan kenaikan suhu pada sensor LM35:
5. Sensor Hujan
Sensor hujan adalah alat yang menggunakan berbagai teknologi untuk mendeteksi hujan dan mengukur intensitasnya. Sensor ini umumnya bekerja dengan cara memantau perubahan kondisi yang diakibatkan oleh kehadiran air, seperti perubahan dalam resistansi atau reflektansi permukaan.
Konfigurasi Pin:
Pin Configuration of Rain Sensor:
S.No:
Name
Function
1
VCC
Connects supply voltage- 5V
2
GND
Connected to ground
3
D0
Digital pin to get digital output
4
A0
Analog pinto get analog output
Spesifikasi:
Grafik Respon
Komponen Output
1).LED
Light Emitting Diode atau yang sering disingkat LED merupakan sebuah komponen elektromagnetik yang dapat memancarkan cahaya monokromatik melalui tegangan maju. LED terbuat dari bahan semi konduktor yang merupakan keluarga dioda.
Klasifikasi tegangan LED menurut warna yang dihasilkan:
Infra merah : 1,6 V.
Merah : 1,8 V – 2,1 V.
Oranye : 2,2 V.
Kuning : 2,4 V.
Hijau : 2,6 V.
Biru : 3,0 V – 3,5 V.
Putih : 3,0 – 3,6 V.
Ultraviolet : 3,5 V.
Pin Out:
2).Relay
Relay merupakan komponen elektronika berupa saklar atau swirch elektrik yang dioperasikan secara listrik dan terdiri dari 2 bagian utama yaitu Elektromagnet (coil) dan mekanikal (seperangkat kontak Saklar/Switch).
Spesifikasi
Konfigurasi Pin:
3).Motor DC
Motor Listrik DC atau DC Motor adalah suatu perangkat yang mengubah energi listrik menjadi energi kinetik atau gerakan (motion).
Spesifikasi :
Built-in gearbox
Vsuplai : Dc 12V
Arus : 2 A
Speed : 400 rpm
Torsi : 6.5 Kg.cm
Ratio gear : 1:21
Dimensi body : panjang 5 cm x diameter 2,5 cm
Dimensi shaft : panjang 1 cm x diameter 4 mm
Berat : 0,2 Kg
Pinout
Grafik respon
4). Logic Gates
Gerbang Logika (Logic Gates) adalah sebuah entitas untuk melakukan pengolahan input-input yang berupa bilangan biner (hanya terdapat 2 kode bilangan biner yaitu, angka 1 dan 0) dengan menggunakan Teori Matematika Boolean sehingga dihasilkan sebuah sinyal output yang dapat digunakan untuk proses berikutnya.
Resistor adalah komponen Elektronika Pasif yang memiliki nilai resistansi atau hambatan tertentu yang berfungsi untuk membatasi dan mengatur arus listrik dalam suatu rangkaian Elektronika (V=I R).
Jenis Resistor yang digunakan disini adalah Fixed Resistor, dimana merupakan resistor dengan nilai tetap terdiri dari film tipis karbon yang diendapkan subtrat isolator kemudian dipotong berbentuk spiral. Keuntungan jenis fixed resistor ini dapat menghasilkan resistor dengan toleransi yang lebih rendah.
Cara menghitung nilai resistor:
Tabel warna
Contoh :
Gelang ke 1: Coklat = 1
Gelang ke 2: Hitam = 0
Gelang ke 3: Hijau = 5 nol dibelakang angka gelang ke-2; atau kalikan 105
Gelang ke : Perak = Toleransi 10%
Maka nilai resistor tersebut adalah 10 * 105 = 1.000.000 Ohm atau 1 MOhm dengan toleransi 10%.
Dioda
Dioda adalah komponen yang terbuat dari bahan semikonduktor dan mempunyai fungsi untuk menghantarkan arus listrik ke satu arah tetapi menghambat arus listrik dari arah sebaliknya. Sebuah Dioda dibuat dengan menggabungkan dua bahan semi-konduktor tipe-P dan semi-konduktor tipe-N. Ketika dua bahan ini digabungkan, terbentuk lapisan kecil lain di antaranya yang disebut depletion layer. Ini karena lapisan tipe-P memiliki hole berlebih dan lapisan tipe-N memiliki elektron berlebih dan keduanya mencoba berdifusi satu sama lain membentuk penghambat resistansi tinggi antara kedua bahan seperti pada gambar di bawah ini. Lapisan penyumbatan ini disebut depletion layer.
Ketika tegangan positif diterapkan ke Anoda dan tegangan negatif diterapkan ke Katoda, dioda dikatakan dalam kondisi bias maju. Selama keadaan ini tegangan positif akan memompa lebih banyak hole ke daerah tipe-P dan tegangan negatif akan memompa lebih banyak elektron ke daerah tipe-N yang menyebabkan depletion layer hilang sehingga arus mengalir dari Anoda ke Katoda. Tegangan minimum yang diperlukan untuk membuat dioda bias maju disebut forward breakdown voltage.
Jika tegangan negatif diterapkan ke anoda dan tegangan positif diterapkan ke katoda, dioda dikatakan dalam kondisi bias terbalik. Selama keadaan ini tegangan negatif akan memompa lebih banyak elektron ke material tipe-P dan material tipe-N akan mendapatkan lebih banyak hole dari tegangan positif yang membuat depletion layer lebih besar dan dengan demikian tidak memungkinkan arus mengalir melaluinya. Kondisi ini hanya terjadi pada dioda yang ideal, kenyataannya arus yang kecil tetap dapat mengalir pada bias terbalik dioda.
Dioda dapat dibagi menjadi beberapa jenis:
1. Dioda Penyearah (Dioda Biasa atau Dioda Bridge) yang berfungsi sebagai penyearah arus AC ke arus DC.
2. Dioda Zener yang berfungsi sebagai pengaman rangkaian dan juga sebagai penstabil tegangan.
3. Dioda LED yang berfungsi sebagai lampu Indikator ataupun lampu penerangan.
4. Dioda Photo yang berfungsi sebagai sensor cahaya.
5. Dioda Schottky yang berfungsi sebagai Pengendali.
Untuk menentukan arus zenner berlaku persamaan:
Keterangan:
Pada grafik terlihat bahwa pada tegangan dibawah ambang batas tegangan mundur (reverse) sebuah dioda akan tembus (menghantar) dan tidak bisa menahan lagi. Batas ini disebut dengan area tegangan breakdown dioda. Kondisi dioda pada area ini adalah tembus atau menghantar dan tidak menghambat. Kemudian pada level tegangan diantara tegangan breakdown dan tegangan forward terdapat area tegangan reverse dan tegangan cut off. Pada area ini kondisi dioda adalah menahan atau tidak mengalirkan arus listrik.
Transistor
Berfungsi sebagai penguat, sebagai sirkuit pemutus dan penyambung arus (switching), stabilisasi tegangan, dan modulasi sinyal.
Konfigurasi Common Base adalah konfigurasi yang kaki Basis-nya di-ground-kan dan digunakan bersama untuk INPUT maupun OUTPUT. Pada Konfigurasi Common Base, sinyal INPUT dimasukan ke Emitor dan sinyal OUTPUT-nya diambil dari Kolektor, sedangkan kaki Basis-nya di-ground-kan. Oleh karena itu, Common Base juga sering disebut dengan istilah “Grounded Base”. Konfigurasi Common Base ini menghasilkan Penguatan Tegangan antara sinyal INPUT dan sinyal OUTPUT namun tidak menghasilkan penguatan pada arus.
Konfigurasi Common Collector (CC) atau Kolektor Bersama memiliki sifat dan fungsi yang berlawan dengan Common Base (Basis Bersama). Kalau pada Common Base menghasilkan penguatan Tegangan tanpa memperkuat Arus, maka Common Collector ini memiliki fungsi yang dapat menghasilkan Penguatan Arus namun tidak menghasilkan penguatan Tegangan. Pada Konfigurasi Common Collector, Input diumpankan ke Basis Transistor sedangkan Outputnya diperoleh dari Emitor Transistor sedangkan Kolektor-nya di-ground-kan dan digunakan bersama untuk INPUT maupun OUTPUT. Konfigurasi Kolektor bersama (Common Collector) ini sering disebut juga dengan Pengikut Emitor (Emitter Follower) karena tegangan sinyal Output pada Emitor hampir sama dengan tegangan Input Basis.
Konfigurasi Common Emitter (CE) atau Emitor Bersama merupakan Konfigurasi Transistor yang paling sering digunakan, terutama pada penguat yang membutuhkan penguatan Tegangan dan Arus secara bersamaan. Hal ini dikarenakan Konfigurasi Transistor dengan Common Emitter ini menghasilkan penguatan Tegangan dan Arus antara sinyal Input dan sinyal Output. Common Emitter adalah konfigurasi Transistor dimana kaki Emitor Transistor di-ground-kan dan dipergunakan bersama untuk INPUT dan OUTPUT. Pada Konfigurasi Common Emitter ini, sinyal INPUT dimasukan ke Basis dan sinyal OUTPUT-nya diperoleh dari kaki Kolektor.
konfigurasi transistor yang digunakan
1. Fixed Bias
Fixed bias pada transistor BJT adalah metode yang sangat sederhana di mana tegangan basis transistor ditetapkan oleh sumber tegangan eksternal melalui sebuah resistor basis (RB). Konfigurasi dasar rangkaian ini melibatkan tegangan suplai (VCC), resistor kolektor (RC), dan resistor basis yang terhubung ke sumber tegangan bias (VBB). Kelebihan dari metode ini adalah kesederhanaannya, namun kelemahannya adalah stabilitas yang rendah. Fixed bias sangat sensitif terhadap variasi parameter transistor seperti β (gain) dan perubahan suhu, sehingga titik kerja transistor dapat mudah bergeser.
Gambar Rangkaian Fixed Bias
Rumus Untuk Rangkaian Fixed Bias
2. Self Bias
Self bias meningkatkan stabilitas dengan menambahkan resistor emitor (RE) yang memberikan umpan balik negatif. Dalam konfigurasi self bias, tegangan basis diatur melalui resistor basis (RB) dan tegangan pada emitor yang dikendalikan oleh arus emitor (IE) yang mengalir melalui RE. Ini membantu menstabilkan arus kolektor (IC) karena perubahan dalam arus kolektor akan mempengaruhi tegangan emitor dan, pada gilirannya, menyesuaikan tegangan basis-emitor (VBE). Metode ini menawarkan stabilitas yang lebih baik dibandingkan fixed bias, tetapi masih relatif sederhana.
Gambar Rangkaian Self Bias
Rumus untuk Rangkaian Self Bias
3. Emitter Bias
Emitter bias menggabungkan pembagi tegangan untuk basis dan resistor emitor untuk mencapai stabilitas yang lebih tinggi. Konfigurasi ini melibatkan dua resistor pembagi tegangan (RB1 dan RB2) yang menetapkan tegangan basis, serta resistor emitor (RE) yang menyediakan umpan balik negatif. Pembagi tegangan memastikan tegangan basis tetap stabil meskipun ada perubahan dalam tegangan suplai atau parameter transistor. Sementara itu, resistor emitor menambah stabilitas termal dengan mengurangi efek perubahan suhu pada arus kolektor. Emitter bias adalah metode yang sangat stabil dan cocok untuk aplikasi yang memerlukan titik kerja yang sangat stabil.
Gambar Rangkaian Emitter Bias
Rumus untuk Rangkaian Emitter Bias
4. Voltage Divider
Voltage-divider Bias adalah arus bias didapatkan dari tegangan di R2 dari hubungan VCC seri dengan R1 dan R2 seperti gambar 61. Untuk mencari arus IB maka dilakukan perubahan rangkaian dengan memakai metoda thevenin sehingga menghasilkan rangkaian pengganti seperti gambar 62. dimana,
Op-Amp
Penguat operasional atau yang dikenal sebagai Op-Amp merupakan suatu rangkaian terintegrasi atau IC yang memiliki fungsi sebagai penguat sinyal, dengan beberapa konfigurasi. Secara ideal Op-Amp memiliki impedansi masukan dan penguatan yang tak berhingga serta impedansi keluaran sama dengan nol. Dalam prakteknya, Op-Amp memiliki impedansi masukan dan penguatan yang besar serta impedansi keluaran yang kecil.
Op-Amp memiliki beberapa karakteristik, diantaranya:
a. Penguat tegangan tak berhingga (AV = ∼)
b. Impedansi input tak berhingga (rin = ∼)
c. Impedansi output nol (ro = 0) d. Bandwidth tak berhingga (BW = ∼)
d. Tegangan offset nol pada tegangan input (Eo = 0 untuk Ein = 0)
Amplifier Operasional:
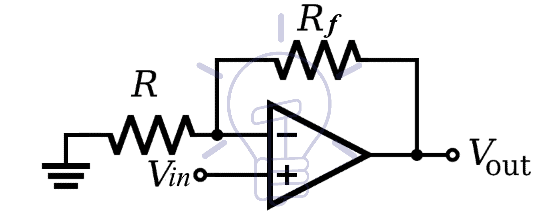
Penguat Pembalik:
Istilah berikut digunakan dalam rumus dan persamaan untuk Penguatan Operasional.
·R f = Resistor umpan balik
·R in = Resistor Masukan
·V in = Tegangan masukan
·V keluar = Tegangan keluaran
·Av = Penguatan Tegangan
Penguatan tegangan:
Gain loop dekat dari penguat pembalik diberikan oleh;
Tegangan Keluaran:
Tegangan keluaran tidak sefasa dengan tegangan masukan sehingga dikenal sebagai penguat pembalik .
Penguat Non-Pembalik:
Istilah yang digunakan untuk rumus dan persamaan Penguat Non-Pembalik.
·R f = Resistor umpan balik
·R = Resistor Tanah
·V masuk = Tegangan masukan
·V keluar = Tegangan keluaran
·Av = Penguatan Tegangan
Keuntungan Penguat:
Gain total penguat non-pembalik adalah;
Tegangan Keluaran:
Tegangan output penguat non-pembalik sefasa dengan tegangan inputnya dan diberikan oleh;
Unity Gain Amplifier / Buffer / Pengikut Tegangan:
Jika resistor umpan balik dilepas yaitu R f = 0, penguat non-pembalik akan menjadi pengikut / penyangga tegangan
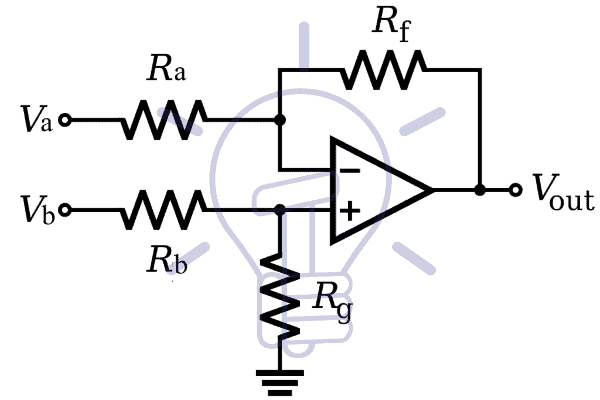
Penguat Diferensial:
Istilah yang digunakan untuk rumus Penguat Diferensial.
·R f = Resistor umpan balik
·R a = Resistor Input Pembalik
·R b = Resistor Input Non Pembalik
·R g = Resistor Ground Non Pembalik
·V a = Tegangan input pembalik
·V b = Tegangan Input Non Pembalik
·V keluar = Tegangan keluaran
·Av = Penguatan Tegangan
Keluaran Umum:
tegangan keluaran dari rangkaian yang diberikan di atas adalah;
Keluaran Diferensial Berskala:
Jika resistor R f = R g & R a = R b , maka output akan diskalakan perbedaan dari tegangan input;
Respon karakteristik I-O:
Gambar grafik ini memperlihatkan rangkaian op-amp dengan kurva karakteristik Input-Output yaitu hubungan Vi terhadap VO. Dari kurva Karakteristik I-O tersebut amplifier bekerja pada karakteristik yang membentuk hubungan linear artinya semakin besar Vi maka semakin besar juga VO dan sebaliknya. Operasi amplifier menghindari output dalam kondisi saturasi karena akan membuat cacat keluaran outputnya
Relay
Relay adalah suatu peranti yang bekerja berdasarkan elektromagnetik untuk menggerakan sejumlah kontaktor yang tersusun atau sebuah saklar elektronis yang dapat dikendalikan dari rangkaian elektronik lainnya dengan memanfaatkan arus listrik sebagai sumber energinya. Kontaktor akan tertutup (menyala) atau terbuka (mati) karena efek induksi magnet yang dihasilkan kumparan (induktor) ketika dialiri arus listrik. Berbeda dengan saklar, pergerakan kontaktor (on atau off) dilakukan manual tanpa perlu arus listrik.
Fungsi-fungsi dan Aplikasi Relay
Beberapa fungsi Relay yang telah umum diaplikasikan kedalam peralatan Elektronika diantaranya adalah :
Relay digunakan untuk menjalankan Fungsi Logika (Logic Function)
Relay digunakan untuk memberikan Fungsi penundaan waktu (Time Delay Function)
Relay digunakan untuk mengendalikan Sirkuit Tegangan tinggi dengan bantuan dari Signal Tegangan rendah.
Ada juga Relay yang berfungsi untuk melindungi Motor ataupun komponen lainnya dari kelebihan Tegangan ataupun hubung singkat (Short).
Kapasitas Pengalihan Maksimum:
Baterai
Baterai (Battery) adalah sebuah alat yang dapat merubah energi kimia yang disimpannya menjadi energi Listrik yang dapat digunakan oleh suatu perangkat Elektronik. Hampir semua perangkat elektronik yang portabel seperti Handphone, Laptop, Senter, ataupun Remote Control menggunakan Baterai sebagai sumber listriknya. Dengan adanya Baterai, kita tidak perlu menyambungkan kabel listrik untuk dapat mengaktifkan perangkat elektronik kita sehingga dapat dengan mudah dibawa kemana-mana. Dalam kehidupan kita sehari-hari, kita dapat menemui dua jenis Baterai yaitu Baterai yang hanya dapat dipakai sekali saja (Single Use) dan Baterai yang dapat di isi ulang (Rechargeable).
Baterai dalam sistem PV mengalami berulang kali siklus pengisian dan pengosongan selama umur pakainya. Siklus hidup (cycle life) baterai adalah banyaknya pengisian dan pengosongan hingga kapasitas baterai turun (melemah) dan tersisa 80% dari kapasitas nominalnya. Pabrik baterai biasanya mencantumkan siklus hidup pada spesifikasi teknis baterai. Mencantumkan satu nilai siklus hidup (cycle life) sebenarnya terlalu menyederhanakan informasi, karena siklus hidup baterai juga tergantung pada suhu baterai.
Dari grafik di atas, terlihat pada suhu operasional baterai yang lebih rendah, siklus hidup baterai lebih lama. Siklus hidup baterai juga tergantung dari DoD, artinya baterai yang dikosongkan hanya 50% dari kapasitasnya, berumur lebih lama jika dikosongkan hingga 80%, namun membuat sistem menjadi lebih mahal, karena membutuhkan kapasitas baterai lebih besar untuk mengakomodasi kebutuhan yang sama.
Jika pada suhu operasional lebih rendah, umur baterai lebih lama, namun ada efek negatif berkaitan dengan kapasitas baterai. Pada suhu yang lebih rendah, kapasitas baterai menjadi lebih rendah. Hal ini disebabkan karena pada suhu yang lebih tinggi, reaksi kimia yang terjadi pada baterai bergerak lebih aktif/cepat, sehingga kapasitas baterai cenderung lebih tinggi.
Terkadang, pada suhu yang lebih tinggi, kapasitas baterai justru dapat lebih besar dari angka nominalnya, meskipun pada suhu tinggi, elemen baterai terlalu aktif, juga berakibat buruk pada kesehatan baterai.
LED
Light Emitting Diode atau sering disingkat dengan LED adalah komponen elektronika yang dapat memancarkan cahaya monokromatik ketika diberikan tegangan maju. LED merupakan keluarga Dioda yang terbuat dari bahan semikonduktor. Warna-warna Cahaya yang dipancarkan oleh LED tergantung pada jenis bahan semikonduktor yang dipergunakannya. LED juga dapat memancarkan sinar inframerah yang tidak tampak oleh mata seperti yang sering kita jumpai pada Remote Control TV ataupun Remote Control perangkat elektronik lainnya.
Tabel warna dan material LED
Motor DC
Motor listrik adalah alat untuk mengubah energi listrik menjadi energi mekanik. Alat yang berfungsi sebaliknya, mengubah energi mekanik menjadi energi listrik disebut generator atau dinamo. Motor listrik dapat ditemukan pada peralatan rumah tangga seperti kipas angin, mesin cuci, pompa air dan penyedot debu
Motor terdiri atas 2 bagian utama yaitu stator dan motor. Pada stator terdapat lilitan (winding) atau magnet permanen, sedangkan rotor adalah bagian yang dialiri dengan sumber arus DC. Arus yang melalui medan magnet inilah yang menyebabkan rotor dapat berputar. Arah gaya elektromagnet yang ditimbulkan akibat medan magnet yang dilalui oleh arus dapat ditentukan dengan menggunakan kaidah tangan kanan.
Keuntungan utama motor DC adalah sebagai pengendali kecepatan, yang tidak mempengaruhi kualitas pasokan daya. Motor ini dapat dikendalikan dengan mengatur:
Tegangan dinamo : meningkatkan tegangan dinamo akan meningkatkan kecepatan
Arus medan : menurunkan arus medan akan meningkatkan kecepatan.
Mekanisme Kerja Motor D
Mekanisme kerja untuk seluruh jenis motor secara umum sama
Arus listrik dalam medan magnet akan menimbulkan gaya.
Jika kawat yang membawa arus dibengkokkan menjadi sebuah lingkaran/loop, maka kedua sisi loop yaitu pada sudut kanan medan magnet akan mendapat gaya pada arah yang berlawanan.
Pasangan gaya menghasilkan torsi untuk memutar kumparan.
Motor- motor memiliki beberapa loop pada dinamonya untuk memberikan tenaga putar yang lebih seragam dari medan magnetnya dihasilkan oleh susunan elektromagnetik yang disebut kumparan medan
Potensiometer
Potensiometer adalah sebuah alat elektronik yang digunakan untuk mengukur dan mengontrol tegangan listrik dalam suatu rangkaian. Potensiometer sering digunakan sebagai pengatur volume pada perangkat audio, pengatur kecerahan lampu, dan dalam berbagai aplikasi lain yang memerlukan kontrol variabel terhadap tegangan atau arus listrik.
Bagian Utama Potensiometer
Resistor: Bagian utama dari potensiometer adalah resistor yang berbentuk linear atau melingkar.
Kontak Geser (Wiper): Sebuah kontak geser yang dapat bergerak sepanjang resistor. Kontak ini mengubah posisi untuk menghasilkan berbagai nilai resistansi.
Tiga Terminal:
- Terminal pertama terhubung ke salah satu ujung resistor.
- Terminal kedua terhubung ke ujung lain dari resistor. - Terminal ketiga terhubung ke kontak geser (wiper).
Cara kerja :
Potensiometer bekerja dengan cara mengubah posisi wiper pada resistor untuk mengatur nilai resistansi antara terminal wiper dan kedua terminal lainnya. Berikut adalah dua konfigurasi utama:
Sebagai Pembagi Tegangan: Potensiometer dapat digunakan sebagai pembagi tegangan dengan menghubungkan dua ujung resistor ke sumber tegangan. Tegangan output diambil dari wiper dan salah satu ujung resistor. Dengan menggeser wiper, tegangan output dapat diatur.
Sebagai Variabel Resistor: Dalam konfigurasi ini, salah satu ujung resistor dan wiper dihubungkan dalam rangkaian, sementara ujung resistor yang lain tidak digunakan. Nilai resistansi dapat diubah dengan menggeser wiper.
Jenis Potensiometer :
Linear: Mengubah resistansi secara linear seiring dengan pergerakan wiper.
Logaritmik: Mengubah resistansi dalam skala logaritmik, sering digunakan dalam pengaturan volume audio karena lebih sesuai dengan respons pendengaran manusia.
PIR Sensor
Cara kerja
iasanya digunakan dalam perancangan detektor gerakan berbasis PIR. Karena semua benda memancarkan energi radiasi, sebuah gerakan akan terdeteksi ketika sumber infra merah dengan suhu tertentu (misal: manusia) melewati sumber infra merah yang lain dengan suhu yang berbeda (misal: dinding), maka sensor akan membandingkan pancaran infra merah yang diterima setiap satuan waktu, sehingga jika ada pergerakan maka akan terjadi perubahan pembacaan pada sensor.
Simbol PIR sensor di proteus:
Sensor PIR terdiri dari beberapa bagian yaitu:
a) Lensa Fresnel
Lensa Fresnel pertama kali digunakan pada tahun 1980an. Digunakan sebagai lensa yang memfokuskan sinar pada lampu mercusuar. Penggunaan paling luas pada lensa Fresnel adalah pada lampu depan mobil, di mana mereka membiarkan berkas parallel secara kasar dari pemantul parabola dibentuk untuk memenuhi persyaratan pola sorotan utama. Namun kini, lensa Fresnel pada mobil telah ditiadakan diganti dengan lensa plain polikarbonat. Lensa Fresnel juga berguna dalam pembuatan film, tidak hanya karena kemampuannya untuk memfokuskan sinar terang, tetapi juga karena intensitas cahaya yang relative konstan diseluruh lebar berkas cahaya.
b) IR Filter
IR Filter dimodul sensor PIR ini mampu menyaring panjang gelombang sinar infrared pasif antara 8 sampai 14 mikrometer, sehingga panjang gelombang yang dihasilkan dari tubuh manusia yang berkisar antara 9 sampai 10 mikrometer ini saja yang dapat dideteksi oleh sensor. Sehingga Sensor PIR hanya bereaksi pada tubuh manusia saja.
c) Pyroelectric Sensor
Seperti tubuh manusia yang memiliki suhu tubuh kira-kira 32˚C, yang merupakan suhu panas yang khas yang terdapat pada lingkungan. Pancaran sinar inframerah inilah yang kemudian ditangkap oleh Pyroelectric sensor yang merupakan inti dari sensor PIR ini sehingga menyebabkan Pyroelectic sensor yang terdiri dari galium nitrida, caesium nitrat dan litium tantalate menghasilkan arus listrik. Mengapa bisa menghasilkan arus listrik? Karena pancaran sinar inframerah pasif ini membawa energi panas. Material pyroelectric bereaksi menghasilkan arus listrik karena adanya energi panas yang dibawa oleh infrared pasif tersebut. Prosesnya hampir sama seperti arus listrik yang terbentuk ketika sinar matahari mengenai solar cell.
d) Amplifier
Sebuah sirkuit amplifier yang ada menguatkan arus yang masuk pada material pyroelectric.
e) Komparator
Setelah dikuatkan oleh amplifier kemudian arus dibandingkan oleh komparator sehingga mengahasilkan output.
Simulasi Gif kasar berikut menunjukkan bagaimana sensor PIR merespons manusia yang bergerak dan mengembangkan beberapa pulsa pendek dan tajam di seluruh output lead-nya untuk pemrosesan yang diperlukan atau memicu tahap relay yang dikonfigurasi dengan tepat
Touch Sensor
Sensor Sentuh adalah sensor elektronik yang dapat mendeteksi sentuhan. Sensor Sentuh ini pada dasarnya beroperasi sebagai sakelar apabila disentuh, seperti sakelar pada lampu, layar sentuh ponsel dan lain sebagainya.Tubuh manusia memiliki Panca Indera yang berfungsi untuk berinteraksi dengan lingkungan di sekitarnya. Konsep yang sama juga diterapkan pada mesin atau perangkat elektronik/listrik agar dapat melakukan interaksi dengan lingkungan disekitarnya. Oleh karena itu, berbagai jenis sensor pun diciptakan untuk melakukan tugas tersebut. Salah satu sensor tersebut adalah Sensor Sentuh atau Touch Sensor.
Berdasarkan fungsinya, Sensor Sentuh dapat dibedakan menjadi dua jenis utama yaitu Sensor Kapasitif dan Sensor Resistif. Sensor Kapasitif atau Capacitive Sensor bekerja dengan mengukur kapasitansi sedangkan sensor Resistif bekerja dengan mengukur tekanan yang diberikan pada permukaannya.
Simbol touch sensor di proteus:
Sensor Kapasitif
Sensor sentuh Kapasitif merupakan sensor sentuh yang sangat populer pada saat ini, hal ini dikarenakan Sensor Kapasitif lebih kuat, tahan lama dan mudah digunakan serta harga yang relatif lebih murah dari sensor resistif. Ponsel-ponsel pintar saat ini telah banyak yang menggunakan teknologi ini karena juga menghasilkan respon yang lebih akurat.
Berbeda dengan Sensor Resistif yang menggunakan tekanan tertentu untuk merasakan perubahan pada permukaan layar, Sensor Kapasitif memanfaatkan sifat konduktif alami pada tubuh manusia untuk mendeteksi perubahan layar sentuhnya. Layar sentuh sensor kapasitif ini terbuat dari bahan konduktif (biasanya Indium Tin Oxide atau disingkat dengan ITO) yang dilapisi oleh kaca tipis dan hanya bisa disentuh oleh jari manusia atau stylus khusus ataupun sarung khusus yang memiliki sifat konduktif.
Pada saat jari menyentuh layar, akan terjadi perubahaan medan listrik pada layar sentuh tersebut dan kemudian di respon oleh processor untuk membaca pergerakan jari tangan tersebut. Jadi perlu diperhatikan bahwa sentuhan kita tidak akan di respon oleh layar sensor kapasitif ini apabila kita menggunakan bahan-bahan non-konduktif sebagai perantara jari tangan dan layar sentuh tersebut.
Sensor Resistif
Tidak seperti sensor sentuh kapasitif, sensor sentuh resistif ini tidak tergantung pada sifat listrik yang terjadi pada konduktivitas pelat logam. Sensor Resistif bekerja dengan mengukur tekanan yang diberikan pada permukaannya. Karena tidak perlu mengukur perbedaan kapasitansi, sensor sentuh resistif ini dapat beroperasi pada bahan non-konduktif seperti pena, stylus atau jari di dalam sarung tangan.
Sensor sentuh resistif terdiri dari dua lapisan konduktif yang dipisahkan oleh jarak atau celah yang sangat kecil. Dua lapisan konduktif (lapisan atas dan lapisan bawah) ini pada dasarnya terbuat dari sebuah film. Film-film umumnya dilapisi oleh Indium Tin Oxide yang merupakan konduktor listrik yang baik dan juga transparan (bening).
Cara kerjanya hampir sama dengan sebuah sakelar, pada saat film lapisan atas mendapatkan tekanan tertentu baik dengan jari maupun stylus, maka film lapisan atas akan bersentuhan dengan film lapisan bawah sehingga menimbulkan aliran listrik pada titik koordinat tertentu layar tersebut dan memberikan signal ke prosesor untuk melakukan proses selanjutnya.
Grafik Respon Sensor Touch
Dapat dilihat bahwa pada grafik di atas saat sentuhan terdeteksi maka signal touch akan muncul.
4. Sensor Suara
Simbol sound detector di proteus:
Sensor suara adalah sensor yang mampu mengubah besaran suara menjadi besaran listrik. Komponen yang terdapat di dalam sensor ini adalah electric condenser microphone atau mic kondenser.. Mic adalah komponen elektronika dimana cara kerjanya yaitu membran yang digetarkan oleh gelombang suara akan menghasilkan sinyal listrik.
Microphone dapat diklasifikasikan menjadi beberapa jenis dasar termasuk dinamis, elektrostatik dan piezoelektrik menurut sistem konversi mereka. Mikrofon dinamis masih memiliki tuntutan besar terutama di dunia musik, sementara mikrofon piezoelektrik secara luas digunakan terutama untuk mikrofon untuk meter rendah tingkat frekuensi suara. Mikrofon dinamis masih memiliki tuntutan besar terutama di dunia musik, sementara mikrofon piezoelektrik Digunakan secara luas terutama untuk mikrofon untuk meter rendah tingkat frekuensi suara. Untuk pengukuran, tipe elektrostatik (kondensor) mikrofon yang paling populer karena mereka dapat dirampingkan, memiliki respon frekuensi rata selama rentang frekuensi yang luas, dan menyediakan nyata stabilitas yang tinggi dibandingkan dengan jenis lain mikrofon.
Detektor Suara memiliki 3 output terpisah. Paling mudah untuk melihat apa yang dilakukan masing-masing dengan grafik. Berikut ini menggambarkan bagaimana detektor suara merespons serangkaian pulsa suara.
Ini menunjukkan tegangan output dari waktu ke waktu
Jejak hijau tua adalah output audio dari detektor suara. Tegangan audio langsung dari mikrofon ditemukan pada output ini.
Jejak hijau muda adalah keluaran amplop. Tegangan analog ini melacak amplitudo suara. Yang menarik, perhatikan bahwa denyut nadi ketiga terasa lebih keras saat berjalan.
Akhirnya, garis merah adalah output gerbang. Output ini rendah ketika kondisi tenang dan menjadi tinggi ketika suara terdeteksi.
5. Sensor Suhu LM35
Sensor LM35 bekerja dengan mengubah besaran suhu menjadi besaran tegangan. Tegangan ideal yang keluar dari LM35 mempunyai perbandingan 100°C setara dengan 1 volt.Sensor ini mempunyai pemanasan diri (self heating) kurang dari 0,1°C, dan dapat dioperasikan dengan menggunakan power supply tunggal dan dapat dihubungkan antar muka (interface) rangkaian kontrol yang sangat mudah.IC LM 35 sebagai sensor suhu yang teliti dan terkemas dalam bentuk Integrated Circuit (IC), dimana output tegangan keluaran sangat linear terhadap perubahan suhu.Sensor ini berfungsi sebagai pengubah dari besaran fisis suhu ke besaran tegangan yang memiliki koefisien sebesar 10 mV /°C yang berarti bahwa kenaikan suhu 1° C maka akan terjadi kenaikan tegangan sebesar 10 mV.
IC LM 35 ini tidak memerlukan proses kalibrasi atau penyetelan dari luar karena ketelitiannya sampai lebih kurang seperempat derajat Celsius pada temperatur ruang.Jangka sensor mulai dari – 55°C sampai dengan 150°C. IC LM35 penggunaannya dapat dikatakan sangat mudah, dapat dialiri arus sebesar 60 μ A dari supplay sehingga panas yang ditimbulkan sendiri sangat rendah kurang dari 0 ° C di dalam suhu ruangan.
Dalam praktiknya proses antarmuka sensor LM35 dapat dikatakan sangat mudah. Pada IC sensor LM35 ini terdapat tiga buah pin kaki yakni Vs, Vout dan pin ground.Dalam pengoperasiannya pin Vs dihubungkan dengan tegangan sumber sebesar antara 4 – 20 volt sementara pin Ground dihubungkan dengan ground dan pin Vout merupakan keluaran yang akan mengalirkan tegangan yang besarnya akan sesuai dengan suhu yang diterimanya dari sekitar
Simbol LM35 di proteus:
Prinsip kerja alat pengukur suhu ini, adalah sensor suhu difungsikan untuk mengubah besaran suhu menjadi tegangan, dengan kata lain panas yang ditangkap oleh LM35 sebagai sensor suhu akan diubah menjadi tegangan.
Berikut hubungan resistansi dengan kenaikan suhu pada sensor LM35:
Ketika ada hewan atau orang mendekati area pemberian makan, sensor PIR akan mendeteksi keberadaan tersebut, yang ditandai dengan testpin berlogika 1. Kondisi ini memicu munculnya tegangan keluaran dari sensor PIR yang menjadi tegangan input (Vinput) pada op-amp. Op-amp yang digunakan merupakan tipe voltage follower (penguatan Acl = 1), sehinggaVout = Vin.
Adanya tegangan output ini menyebabkan arus mengalir melalui resistor R1, menuju kaki basis transistor, kemudian ke emitter, dan akhirnya ke ground. Karena transistor menggunakan konfigurasi emitter-stabilized bias, arus juga mengalir dari power supply 6V, melewati resistor R21, ke basis, ke emitter, lalu ke ground. Jika tegangan basis-emitter (Vbe) melebihi 0.7V, transistor masuk mode aktif. Maka arus kolektor akan mengalir dari power supply 6V, melalui resistor R2, melewati kumparan relay, ke kolektor, lalu ke emitter dan menuju ground.
Ketika arus mengalir melalui relay (yang berupa kumparan), terbentuk medan magnet yang menarik saklar ke posisi aktif, sehingga rangkaian sisi kanan terhubung. Akibatnya, arus dari baterai 12V mengalir dan mengaktifkan buzzer sebagai penanda bahwa ada aktivitas di area tersebut.
Selanjutnya, suara dari buzzer akan terdeteksi oleh sound sensor, ditandai dengan testpin yang berlogika 1. Tegangan keluaran dari sensor ini menjadi Vinput untuk op-amp jenis differential amplifier, dengan outputnya (Vo) diperoleh dari selisih antara sinyal non-inverting dan inverting input. Tegangan output ini menyebabkan arus mengalir ke resistor R4, kemudian ke kaki basis transistor, dilanjutkan ke emitter dan ke ground. Dalam konfigurasi fixed bias, arus juga mengalir dari power supply 5V melalui resistor R18 ke basis, emitter, dan ke ground. Ketika Vbe mencapai lebih dari 0.7V, transistor berada pada daerah aktif dan arus kolektor akan mengalir dari sumber 5V, melalui resistor R6 dan relay, ke kolektor, emitter, lalu ke ground.
Dengan mengalirnya arus pada relay, terbentuk medan magnet yang menarik saklar dan menghubungkan sisi kanan rangkaian. Aliran arus dari baterai 12V kemudian mengaktifkan LED, buzzer, dan motor penggerak konveyor, sehingga konveyor akan aktif bergerak membawa pakan atau objek sesuai sistem, dan LED menyala sebagai indikator bahwa sistem sedang bekerja.
Touch sensor
Ketika terjadi sentuhan, sensor sentuh akan mendeteksi sentuhan tersebut yang ditandai dengan testpin berlogika 1. Kondisi ini menghasilkan tegangan keluaran dari sensor sentuh yang kemudian menjadi tegangan input (Vinput) bagi op-amp. Op-amp yang digunakan merupakan tipe non-inverting amplifier, dengan tegangan keluarannya (Vo) dihitung menggunakan rumus: Vo = [(Rf/Rin) + 1] × Vi.
Adanya tegangan output ini menyebabkan arus mengalir menuju resistor basis (RB), kemudian ke kaki basis transistor, dilanjutkan ke kaki emitter, melewati resistor emitter (RE), dan akhirnya ke ground. Transistor yang digunakan memiliki pembiasan self-bias. Ketika tegangan basis-emitter (Vbe) melebihi 0.7V, transistor masuk ke dalam mode aktif. Dalam kondisi ini, arus basis yang mengalir memungkinkan arus kolektor untuk mengalir dari sumber 10V, melewati kumparan relay, masuk ke kaki kolektor, terus ke emitter, melalui RE, lalu ke ground.
Ketika arus mengalir melalui kumparan pada relay, terbentuk medan magnet yang menggerakkan saklar ke posisi terhubung. Akibatnya, rangkaian pada sisi keluaran menjadi aktif. Arus dari baterai 12V kemudian mengalir melalui resistor R11 dan LED, serta melalui motor DC. Hal ini menyebabkan LED menyala dan motor berputar, yang dalam konteks ini akan menggerakkan katup pakan ternak terbuka, sehingga pakan akan keluar secara otomatis.
Prinsip Kerja : Rangkaian pada Tugas 1 dirancang untuk mengatur sistem pembukaan dan penutupan katup makanan secara otomatis menggunakan sensor sentuh (touch sensor). Sensor ini ditempatkan dekat mesin dan berfungsi sebagai saklar elektronik yang merespons sentuhan jari manusia. Ketika sensor disentuh, ia akan mengeluarkan tegangan logika tinggi (HIGH) sekitar 5 volt pada pin OUT-nya. Tegangan ini kemudian diteruskan sebagai sinyal masukan ke rangkaian penguat operasional (Op-Amp) LM741 yang dikonfigurasi sebagai non-inverting amplifier.
Konfigurasi non-inverting ini bekerja berdasarkan prinsip penguatan sinyal, dengan rumus output:
Vo=(1+RinRf)⋅Vin
Dalam rangkaian ini, nilai Rf=1kΩR_f = 1k \OmegaRf=1kΩ dan Rin=1kΩR_{in} = 1k \OmegaRin=1kΩ, sehingga sinyal dari sensor sebesar 5 volt akan dikuatkan menjadi 10 volt di keluaran op-amp. Tegangan keluaran ini selanjutnya digunakan untuk mengaktifkan transistor PNP (Q3) yang dikonfigurasi dengan metode self bias, di mana basis transistor diatur dengan resistor pembagi tegangan yang menjaga kestabilan kerja transistor ketika menerima sinyal penguat dari op-amp.
Ketika transistor aktif (basis-nya lebih negatif dari emitter), arus mengalir dari kolektor ke emitter, yang kemudian mengaktifkan relay RL5. Relay ini bertindak sebagai saklar elektromagnetik yang menghubungkan sumber daya 12V dari baterai ke motor penggerak katup makanan. Motor tersebut akan bekerja membuka dan menutup katup secara otomatis sesuai dengan perintah dari sistem. Di saat yang bersamaan, LED biru (D5) akan menyala sebagai indikator bahwa sistem telah merespons perintah dari sensor sentuh, memberi umpan balik visual kepada pengguna bahwa sentuhan berhasil dideteksi.
Rangkaian juga dilengkapi dengan dioda D4 yang dipasang paralel dengan kumparan relay sebagai dioda flyback. Fungsinya adalah melindungi transistor dari lonjakan arus balik (induktif kickback) yang dapat terjadi ketika arus ke kumparan relay diputus secara tiba-tiba. Hal ini penting untuk menjaga keawetan transistor dan menghindari kerusakan komponen elektronik akibat tegangan tinggi sesaat.
Secara keseluruhan, rangkaian ini menggambarkan sebuah sistem otomatis yang efisien dan tanggap, yang tidak memerlukan tekanan mekanik seperti pada tombol biasa. Dengan hanya menyentuh permukaan sensor, pengguna dapat mengontrol mekanisme pembukaan dan penutupan katup makanan secara otomatis dan higienis. Hal ini sangat bermanfaat dalam konteks mesin pakan otomatis, dispenser makanan, atau alat sejenis yang mengedepankan kenyamanan, kecepatan, dan kebersihan dalam pengoperasiannya.
2. Load Cell Sensor dan Sounds Sensor
Prinsip Kerja : Rangkaian ini merupakan sistem otomatisasi yang digunakan untuk mengatur distribusi pakan ternak menggunakan dua buah sensor utama: sensor berat (load cell) dan sensor suara. Tujuan dari sistem ini adalah untuk memastikan pakan ternak hanya didistribusikan ketika berat pakan mencukupi dan ketika suara hewan terdeteksi, sehingga proses pemberian pakan menjadi lebih adaptif dan efisien.
Sensor pertama yang digunakan adalah load cell (LC1), yang bekerja sebagai pendeteksi berat pakan. Sensor ini diletakkan di bawah wadah pakan, dan akan mengeluarkan sinyal tegangan kecil yang sebanding dengan gaya berat yang diterimanya. Sinyal dari load cell ini diteruskan ke rangkaian penguat operasional U1 (IC 741) yang dikonfigurasi sebagai voltage follower (pengikut tegangan), untuk menghasilkan sinyal keluaran yang sama besar dengan masukan tetapi dengan impedansi yang lebih rendah. Hal ini penting untuk menjaga kestabilan sinyal sebelum digunakan lebih lanjut.
Setelah sinyal dikuatkan, tegangan ini digunakan untuk mengatur transistor Q1 (NPN 2N2222) dengan konfigurasi emitter stabilized. Rangkaian ini akan mengaktifkan relay RL1 ketika berat pakan telah mencapai ambang tertentu, misalnya lebih dari 98 satuan (seperti ditandai dalam gambar). Relay RL1 akan mengaktifkan buzzer sebagai pemberitahuan bahwa pakan siap didistribusikan, sekaligus mengaktifkan sensor suara.
Sensor suara diletakkan di dekat area ternak dan akan merespons suara binatang, seperti suara sapi atau kambing saat meminta makan. Sensor ini akan mengeluarkan sinyal tegangan logika tinggi (HIGH) ketika suara terdeteksi. Sinyal dari sensor suara kemudian masuk ke rangkaian penguat operasional U2, yang dikonfigurasi sebagai differential amplifier (penguat diferensial). Rangkaian ini membandingkan dua sinyal masukan dan menghasilkan tegangan keluaran yang merupakan selisih dari keduanya, sesuai rumus:
Vo=(R1Rf)(V2−V1)
Dalam desain ini, ketika suara terdeteksi dan selisih tegangan cukup besar (misalnya, 3V dari hasil diferensial), maka transistor Q2 (juga 2N2222) akan aktif dalam mode mixed bias, dan mengalirkan arus ke relay RL2. Aktivasi relay RL2 akan menyalakan motor penggerak konveyor, yang akan mulai menggerakkan pakan melalui sekat-sekat atau jalur conveyor menuju tempat makan hewan.
Sebagai penanda visual bahwa proses distribusi berlangsung, terdapat LED biru (D3) yang akan menyala bersamaan dengan aktifnya motor. LED ini memberi isyarat bahwa sistem telah mendeteksi input suara dan berat pakan yang mencukupi, serta conveyor sedang beroperasi.
Selain itu, sistem juga dilengkapi dengan dioda proteksi (D1 dan D2) yang dipasang secara paralel dengan kumparan relay RL1 dan RL2. Fungsi utama dioda ini adalah sebagai flyback diode, yaitu melindungi transistor dari tegangan induktif balik yang dihasilkan saat relay dimatikan secara tiba-tiba. Tegangan ini bisa merusak transistor bila tidak ditangani.
Secara keseluruhan, sistem ini memperlihatkan integrasi dua sensor (berat dan suara) yang saling mendukung untuk memastikan distribusi pakan dilakukan secara otomatis dan responsif. Sistem tidak hanya memperhitungkan ketersediaan pakan melalui sensor berat, tetapi juga menangkap kebutuhan hewan melalui sensor suara. Dengan demikian, distribusi pakan menjadi lebih adaptif, efisien, dan mengurangi keterlibatan manusia secara langsung dalam proses rutin ini.
3. Rain Sensor
Prinsip Kerja : ini merupakan pengembangan sistem otomatisasi peternakan yang semakin kompleks dan cerdas. Fokus utama dari sistem ini adalah pendeteksian hujan otomatis untuk mengontrol proses pembuangan sisa pakan melalui konveyor otomatis, demi menjaga kualitas pakan dan kebersihan lingkungan kandang. Dalam sistem ini, digunakan sensor hujan, rangkaian penguat operasional (op-amp), transistor sebagai saklar, relay, dan motor penggerak konveyor yang dilengkapi indikator LED sebagai penanda visual proses kerja sistem.
Sensor utama yang digunakan adalah sensor hujan tipe HL-83, yang terdiri dari dua bagian: panel sensor (berupa papan bercorak jalur konduktor terbuka) dan modul kontrol yang dapat memberikan output logika ketika sensor mendeteksi adanya tetesan air. Sensor ini bekerja dengan prinsip bahwa ketika hujan turun dan tetesan air membasahi jalur konduktor, resistansi antara jalur menjadi sangat rendah sehingga arus bisa mengalir. Hal ini kemudian menghasilkan sinyal tegangan output yang menunjukkan bahwa hujan telah terdeteksi.
Sinyal tegangan dari sensor hujan kemudian dimasukkan ke dalam rangkaian penguat operasional U4 (IC 741) yang dikonfigurasi sebagai inverting amplifier. Dalam konfigurasi ini, tegangan output yang dihasilkan akan berbanding terbalik dengan tegangan input, sesuai rumus:
Vo=−(RiRf)×Vi
Nilai resistor umpan balik Rf=5kΩR_f = 5k\OmegaRf=5kΩ dan resistor input Ri=15kΩR_i = 15k\OmegaRi=15kΩ digunakan untuk mengatur penguatan (gain) sinyal. Fungsi utama dari penguat ini adalah untuk memperkuat sinyal kecil dari sensor hujan menjadi cukup besar agar dapat digunakan sebagai pemicu aktifasi transistor dan relay.
Keluaran dari op-amp kemudian diteruskan ke basis transistor PNP (Q4) dengan konfigurasi fixed bias. Dalam konfigurasi ini, arus basis ditentukan oleh pembagi tegangan eksternal. Ketika hujan terdeteksi dan tegangan output dari op-amp cukup besar (negatif sesuai inverting amplifier), maka transistor akan aktif. Arus akan mengalir dari emitter ke kolektor, dan mengaktifkan relay RL4, yang pada gilirannya mengaktifkan motor konveyor B4.
Motor ini bertugas untuk menggerakkan konveyor yang membuang sisa pakan secara otomatis dari dalam kandang. Ini penting karena jika sisa pakan terkena hujan, maka pakan akan cepat membusuk, menjadi tempat berkembangnya bakteri, serta bisa membahayakan kesehatan ternak. Dengan sistem ini, setiap kali hujan turun dan terdeteksi, maka proses pembersihan otomatis akan terjadi tanpa perlu intervensi manusia.
Sebagai pelengkap, sistem ini juga dilengkapi dengan LED merah (D9) yang berfungsi sebagai indikator bahwa sensor hujan telah aktif dan sistem telah merespons dengan benar. Selain itu, terdapat dioda proteksi (D6) pada paralel relay yang berfungsi sebagai flyback diode untuk mengamankan transistor dari tegangan induktif balik saat relay dimatikan.
Sensor hujan dipasang di dalam dan luar kandang, dengan tujuan agar sistem dapat mendeteksi kelembaban atau cipratan hujan dari segala arah. Dengan demikian, sistem ini bukan hanya reaktif terhadap hujan langsung, tetapi juga terhadap kondisi lembab yang bisa menyebabkan kerusakan pada pakan.
Secara keseluruhan, sistem ini merupakan upaya cerdas untuk menciptakan kandang yang bersih dan pakan yang tetap higienis meskipun dalam kondisi cuaca hujan. Sistem otomatis ini membantu peternak dalam menjaga efisiensi, kebersihan, dan kesehatan ternak dengan memanfaatkan teknologi sensor dan kontrol elektronik sederhana namun efektif.
4. Sensor Suhu
Prinsip Kerja : ini merupakan bagian lanjutan dari sistem otomatisasi kandang yang kini mengintegrasikan sensor suhu (LM35) sebagai komponen utama untuk mendeteksi suhu lingkungan di dalam kandang. Sistem ini dirancang agar konveyor otomatis membuang sisa pakan apabila suhu berada di luar ambang batas ideal, yakni ketika suhu terlalu rendah (kurang dari 25°C) atau terlalu tinggi (lebih dari 35°C). Tujuan dari sistem ini adalah menjaga pakan tetap dalam kondisi baik, menghindari pembusukan, dan memastikan kenyamanan serta kesehatan hewan ternak.
Sensor suhu LM35 bekerja dengan menghasilkan tegangan analog yang proporsional terhadap suhu dalam satuan derajat Celsius (10 mV/°C). Misalnya, jika suhu 24°C, maka output tegangan dari LM35 adalah sekitar 0,24V. Tegangan ini kemudian dimasukkan ke dalam dua jalur pembanding, masing-masing dengan konfigurasi berbeda, yaitu non-inverting comparator dan inverting comparator, yang masing-masing menggunakan IC op-amp LM741 (U7 dan U8).
Jalur pertama adalah untuk mendeteksi suhu lebih dari 35°C. Tegangan output dari LM35 dibandingkan dengan tegangan referensi (Vref) sebesar 0,35V menggunakan op-amp U7 yang dikonfigurasi sebagai non-inverting comparator. Ketika suhu melebihi 35°C, maka tegangan output dari LM35 akan lebih besar dari Vref, menyebabkan output op-amp menjadi tinggi (positif) dan mengaktifkan transistor NPN (Q8, BC547). Transistor ini bekerja dalam mode voltage divider bias, artinya pengaturan basis transistor dilakukan melalui pembagi tegangan sehingga arus dapat mengalir dan mengaktifkan relay RL9, yang kemudian menggerakkan motor konveyor untuk membuang sisa pakan.
Sementara itu, jalur kedua digunakan untuk mendeteksi suhu kurang dari 25°C. Jalur ini menggunakan op-amp U8 dalam konfigurasi inverting comparator, di mana tegangan input dari LM35 dimasukkan ke terminal pembalik (-) dan dibandingkan dengan tegangan referensi sebesar 0,25V. Jika suhu di bawah 25°C (misalnya 24°C = 0,24V), maka tegangan input akan lebih rendah dari Vref, menyebabkan output op-amp menjadi tinggi (negatif dalam konfigurasi ini), dan mengaktifkan transistor PNP (dengan konfigurasi self-bias). Transistor ini kemudian menyalakan relay RL6, yang mengaktifkan motor konveyor lainnya untuk membuang sisa pakan dari sisi berbeda.
Setiap jalur relay dilengkapi dengan dioda flyback (D10 dan D7) untuk mencegah lonjakan tegangan akibat induktansi dari koil relay saat dimatikan, sehingga komponen transistor tidak rusak. Rangkaian juga dilengkapi dengan resistor pull-up dan pembagi tegangan (seperti R23, R24, R5, R7, dan lainnya) untuk mengatur arus dan tegangan yang sesuai ke setiap bagian sirkuit.
Dengan sistem ini, pengelolaan suhu di dalam kandang menjadi lebih optimal karena sistem dapat secara otomatis membuang pakan yang berpotensi membusuk akibat suhu ekstrem. Selain menjaga kualitas pakan, sistem ini juga berkontribusi terhadap kenyamanan dan kesehatan hewan ternak secara menyeluruh.
Penerapan dua jalur suhu (rendah dan tinggi) yang mengontrol motor konveyor yang berbeda membuat sistem ini tidak hanya cerdas tetapi juga fleksibel terhadap berbagai kondisi lingkungan. Penempatan sensor di dinding kandang juga bertujuan agar pembacaan suhu lebih representatif terhadap suhu lingkungan aktual yang dirasakan oleh hewan ternak.










 Spesifikasi :
Spesifikasi :


 Spesifikasi :
Spesifikasi :

 Potensiometer adalah sebuah alat elektronik yang digunakan untuk mengukur dan mengontrol tegangan listrik dalam suatu rangkaian. Potensiometer sering digunakan sebagai pengatur volume pada perangkat audio, pengatur kecerahan lampu, dan dalam berbagai aplikasi lain yang memerlukan kontrol variabel terhadap tegangan atau arus listrik.
Potensiometer adalah sebuah alat elektronik yang digunakan untuk mengukur dan mengontrol tegangan listrik dalam suatu rangkaian. Potensiometer sering digunakan sebagai pengatur volume pada perangkat audio, pengatur kecerahan lampu, dan dalam berbagai aplikasi lain yang memerlukan kontrol variabel terhadap tegangan atau arus listrik.







 Sensor PIR (Passive Infra Red) adalah sensor yang digunakan untuk mendeteksi adanya pancaran sinar infra merah. Sensor PIR bersifat pasif, artinya sensor ini tidak memancarkan sinar infra merah tetapi hanya menerima radiasi sinar infra merah dari luar. Konfigurasi Pin:
Sensor PIR (Passive Infra Red) adalah sensor yang digunakan untuk mendeteksi adanya pancaran sinar infra merah. Sensor PIR bersifat pasif, artinya sensor ini tidak memancarkan sinar infra merah tetapi hanya menerima radiasi sinar infra merah dari luar. Konfigurasi Pin:
 Grafik respon sensor PIR:
Grafik respon sensor PIR:




 Spesifikasi
Spesifikasi Grafik Respon Sensor Touch
Grafik Respon Sensor Touch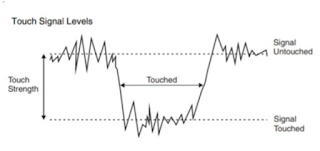 Dapat dilihat bahwa pada grafik di atas saat sentuhan terdeteksi maka signal touch akan muncul.
Dapat dilihat bahwa pada grafik di atas saat sentuhan terdeteksi maka signal touch akan muncul. Sensor suara adalah sebuah alat yang mampu mengubah gelombang Sinusioda suara menjadi gelombang sinus energi listrik (Alternating Sinusioda Electric Current). Sensor suara bekerja berdasarkan besar kecilnya kekuatan gelombang suara yang mengenai membran sensor yang menyebabkan bergeraknya membran sensor yang juga terdapat sebuah kumparan kecil di balik membran tersebut naik dan turun. Kecepatan gerak kumparan tersebut menentukan kuat lemahnya gelombang listrik yang dihasilkannya.
Sensor suara adalah sebuah alat yang mampu mengubah gelombang Sinusioda suara menjadi gelombang sinus energi listrik (Alternating Sinusioda Electric Current). Sensor suara bekerja berdasarkan besar kecilnya kekuatan gelombang suara yang mengenai membran sensor yang menyebabkan bergeraknya membran sensor yang juga terdapat sebuah kumparan kecil di balik membran tersebut naik dan turun. Kecepatan gerak kumparan tersebut menentukan kuat lemahnya gelombang listrik yang dihasilkannya. 

 Sensor LM35 bekerja dengan mengubah besaran suhu menjadi besaran tegangan. Tegangan ideal yang keluar dari LM35 mempunyai perbandingan 100°C setara dengan 1 volt.
Sensor LM35 bekerja dengan mengubah besaran suhu menjadi besaran tegangan. Tegangan ideal yang keluar dari LM35 mempunyai perbandingan 100°C setara dengan 1 volt.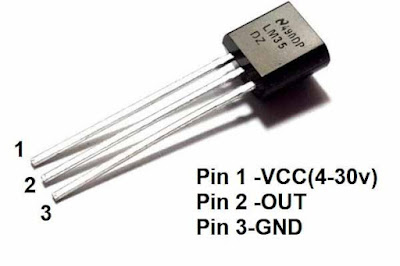 Spesifikasi :
Spesifikasi :


.webp)










.webp)



 Pin Out:
Pin Out:





 Konfigurasi Pin:
Konfigurasi Pin:







 Pinout
Pinout












 1. Dioda Penyearah (Dioda Biasa atau Dioda Bridge) yang berfungsi sebagai penyearah arus AC ke arus DC.2. Dioda Zener yang berfungsi sebagai pengaman rangkaian dan juga sebagai penstabil tegangan.3. Dioda LED yang berfungsi sebagai lampu Indikator ataupun lampu penerangan.4. Dioda Photo yang berfungsi sebagai sensor cahaya.5. Dioda Schottky yang berfungsi sebagai Pengendali.
1. Dioda Penyearah (Dioda Biasa atau Dioda Bridge) yang berfungsi sebagai penyearah arus AC ke arus DC.2. Dioda Zener yang berfungsi sebagai pengaman rangkaian dan juga sebagai penstabil tegangan.3. Dioda LED yang berfungsi sebagai lampu Indikator ataupun lampu penerangan.4. Dioda Photo yang berfungsi sebagai sensor cahaya.5. Dioda Schottky yang berfungsi sebagai Pengendali. Keterangan:
Keterangan:
 Pada grafik terlihat bahwa pada tegangan dibawah ambang batas tegangan mundur (reverse) sebuah dioda akan tembus (menghantar) dan tidak bisa menahan lagi. Batas ini disebut dengan area tegangan breakdown dioda. Kondisi dioda pada area ini adalah tembus atau menghantar dan tidak menghambat. Kemudian pada level tegangan diantara tegangan breakdown dan tegangan forward terdapat area tegangan reverse dan tegangan cut off. Pada area ini kondisi dioda adalah menahan atau tidak mengalirkan arus listrik.
Pada grafik terlihat bahwa pada tegangan dibawah ambang batas tegangan mundur (reverse) sebuah dioda akan tembus (menghantar) dan tidak bisa menahan lagi. Batas ini disebut dengan area tegangan breakdown dioda. Kondisi dioda pada area ini adalah tembus atau menghantar dan tidak menghambat. Kemudian pada level tegangan diantara tegangan breakdown dan tegangan forward terdapat area tegangan reverse dan tegangan cut off. Pada area ini kondisi dioda adalah menahan atau tidak mengalirkan arus listrik.
 Gambar Rangkaian Fixed Bias
Gambar Rangkaian Fixed Bias Rumus Untuk Rangkaian Fixed Bias
Rumus Untuk Rangkaian Fixed Bias Gambar Rangkaian Self Bias
Gambar Rangkaian Self Bias Rumus untuk Rangkaian Self Bias
Rumus untuk Rangkaian Self Bias Gambar Rangkaian Emitter Bias
Gambar Rangkaian Emitter Bias Rumus untuk Rangkaian Emitter Bias
Rumus untuk Rangkaian Emitter Bias














 Penguat operasional atau yang dikenal sebagai Op-Amp merupakan suatu rangkaian terintegrasi atau IC yang memiliki fungsi sebagai penguat sinyal, dengan beberapa konfigurasi. Secara ideal Op-Amp memiliki impedansi masukan dan penguatan yang tak berhingga serta impedansi keluaran sama dengan nol. Dalam prakteknya, Op-Amp memiliki impedansi masukan dan penguatan yang besar serta impedansi keluaran yang kecil.
Penguat operasional atau yang dikenal sebagai Op-Amp merupakan suatu rangkaian terintegrasi atau IC yang memiliki fungsi sebagai penguat sinyal, dengan beberapa konfigurasi. Secara ideal Op-Amp memiliki impedansi masukan dan penguatan yang tak berhingga serta impedansi keluaran sama dengan nol. Dalam prakteknya, Op-Amp memiliki impedansi masukan dan penguatan yang besar serta impedansi keluaran yang kecil.














.png)
 Jika pada suhu operasional lebih rendah, umur baterai lebih lama, namun ada efek negatif berkaitan dengan kapasitas baterai. Pada suhu yang lebih rendah, kapasitas baterai menjadi lebih rendah. Hal ini disebabkan karena pada suhu yang lebih tinggi, reaksi kimia yang terjadi pada baterai bergerak lebih aktif/cepat, sehingga kapasitas baterai cenderung lebih tinggi.
Jika pada suhu operasional lebih rendah, umur baterai lebih lama, namun ada efek negatif berkaitan dengan kapasitas baterai. Pada suhu yang lebih rendah, kapasitas baterai menjadi lebih rendah. Hal ini disebabkan karena pada suhu yang lebih tinggi, reaksi kimia yang terjadi pada baterai bergerak lebih aktif/cepat, sehingga kapasitas baterai cenderung lebih tinggi.











 Sensor Sentuh adalah sensor elektronik yang dapat mendeteksi sentuhan. Sensor Sentuh ini pada dasarnya beroperasi sebagai sakelar apabila disentuh, seperti sakelar pada lampu, layar sentuh ponsel dan lain sebagainya. Tubuh manusia memiliki Panca Indera yang berfungsi untuk berinteraksi dengan lingkungan di sekitarnya. Konsep yang sama juga diterapkan pada mesin atau perangkat elektronik/listrik agar dapat melakukan interaksi dengan lingkungan disekitarnya. Oleh karena itu, berbagai jenis sensor pun diciptakan untuk melakukan tugas tersebut. Salah satu sensor tersebut adalah Sensor Sentuh atau Touch Sensor.
Sensor Sentuh adalah sensor elektronik yang dapat mendeteksi sentuhan. Sensor Sentuh ini pada dasarnya beroperasi sebagai sakelar apabila disentuh, seperti sakelar pada lampu, layar sentuh ponsel dan lain sebagainya. Tubuh manusia memiliki Panca Indera yang berfungsi untuk berinteraksi dengan lingkungan di sekitarnya. Konsep yang sama juga diterapkan pada mesin atau perangkat elektronik/listrik agar dapat melakukan interaksi dengan lingkungan disekitarnya. Oleh karena itu, berbagai jenis sensor pun diciptakan untuk melakukan tugas tersebut. Salah satu sensor tersebut adalah Sensor Sentuh atau Touch Sensor.















.png)














 Sensor Kapasitif
Sensor Kapasitif
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















Komentar
Posting Komentar